 咨询热线:13926053918
咨询热线:13926053918

咨询热线:13926053918
自动机器人三维扫描系统大幅面蓝光扫描
添加时间:2026-06-06 07:21:49
● 对于部分零部件实现自动规划扫描轨迹(无需人工编程控制机器人),部分复杂零部件存在干涉多,遮挡复杂的需要进行人工编程控制。
● 系统自动测技术:在工作过程中能对校准状态、转换精度、环境变化和部件位移进行实时控,并给予补偿,测量数据的可靠性。
● 扫描仪测量头集成激光示距,可直观标示当前扫描距离,并在投射光栅时自动关闭。
● 对于部分零部件实现自动规划扫描轨迹(无需人工编程控制机器人),部分复杂零部件存在干涉多,遮挡复杂的需要进行人工编程控制。
● 系统自动测技术:在工作过程中能对校准状态、转换精度、环境变化和部件位移进行实时控,并给予补偿,测量数据的可靠性。
● 具体自动曝光和双曝光模式。针对不同颜色的工件,可实现曝光时间自动调整;扫描过程中,标志点和被测工件处在不同曝光区间,避免环境光过亮或过暗带来误差(对于高亮反光零部件表面需要喷显影剂后进行扫描)。
● 相机标定:采用12位环形编码点标定板进行系统标定,软件有标定指引界面,保证设备标定精度,支持多测头同时标定,支持外部导入点标定,支持外部图像导入进行标定。标定过程中,支持多种图像去畸变模式;若配置电动转台可自动标定。
● 拼接方式:支持基于标志点、特征拼接和基于电动转台的三种全自动拼接方式。
● 全局精度控制:扫描系统自带摄影测量功能,可以先扫描标志点,进行全局点的计算和测量,再扫描物体点云,保证复杂工件的拼接精度。
● 分组扫描:支持对同一个工件进行分组扫描,可新建多个分组进行工件不同位置的扫描,之后将不同组的扫描结果进行对齐拼接,得到复杂工件的扫描数据。
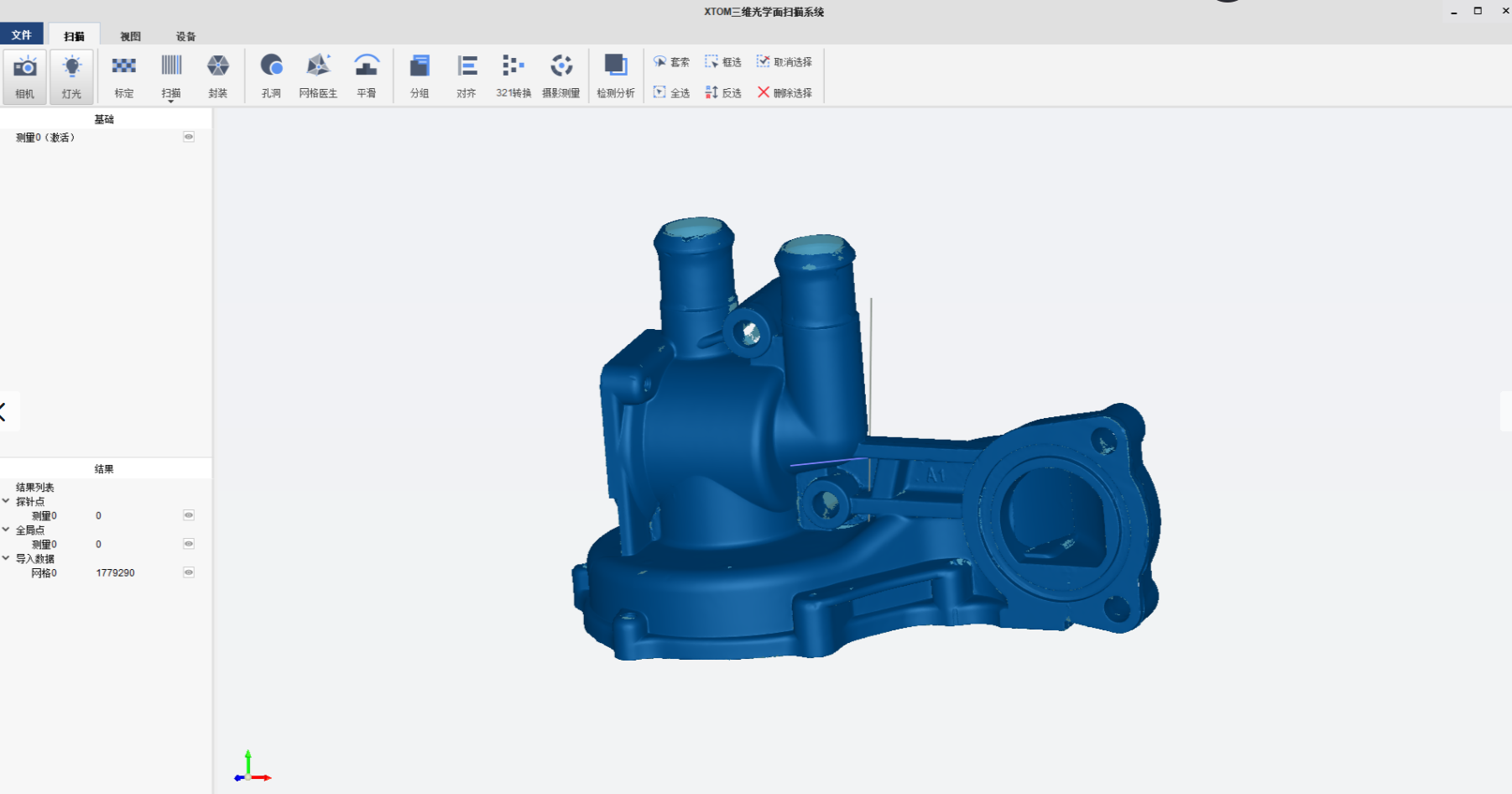
● 单次扫描结果自动生成网格数据(STL),并自动去除标记点,提高数据精度,减少后处理时间。
● 探针测量:对于沟槽、孔洞等难以扫描的死角,系统具备接触式探针测量功能。
● 多重混合扫描:具备单目、双目等多种模式,针对不同表面特征的被测物可以采取不同的扫描模式,以获得更好的扫描结果。
● 网格补洞:对于无法扫描和测量的区域,系统可以根据曲率自动完成修补补洞;也可根据需要,手动填补孔洞。
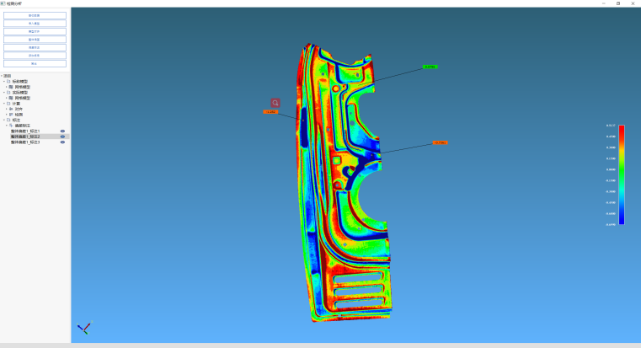
● 检测软件具有数据对齐功能:具备自动对齐和手动对齐两种模式,实现CAD模型和扫描结果对齐。
● 检测软件可计算CAD和扫描结果之间的偏差,结果以色谱图的形式表现,并可根据需要,标注位置的点偏差。
CONTACT US
感谢您访问杏彩体育集团科技有限公司官网。如您有产品咨询、方案定制或合作意向,欢迎通过以下方式与我们联系,我们将安排专业工程师在第一时间为您提供技术支持与报价服务。
 13926053918
13926053918
 xingcaitiyu@gzsgfm.com
xingcaitiyu@gzsgfm.com
 广东省广州市天河区大岗路18号灏景大厦3021房
广东省广州市天河区大岗路18号灏景大厦3021房

Copyright © 2026 杏彩体育集团科技有限公司 版权所有